APON无线定位测距仪应用于天车定位
已有 637 次阅读 2018-07-24 15:44天车的定位方式有刻度标尺精确定位系统和APON无线定位测距仪两种,其中APON无线定位测距仪作为无线定位方式,安装维护简便,深受广大用户喜爱。
APON无线定位测距仪(简称APON)是一种高精度测速测距、实时定位系统,模块采用独特的应答式单脉冲雷达测距原理,通过在两套模块之间发送和接收脉冲实现计算,用于对设备移动过程中进行实时定位和速度检测。
APON无线定位测距仪由定位硬件层、数据处理层组成。定位硬件层是APON实现定位功能的主体部分,包括基站天线和移动天线(两模块可互换);数据处理层则是实现位置计算和速度计算的关键。根据项目实际需要,基站天线是定位系统的基准锚点,其位置和安装角度固定,为系统确定了空间坐标基准;移动天线是移动的,可实时获取周围基站天线的位置,由控制解算模块计算设备本身的位置和速度。
APON无线定位测距仪技术原理
APON测速测距功能基于模块采用独特的应答式单脉冲雷达测距原理,算法概述如下:
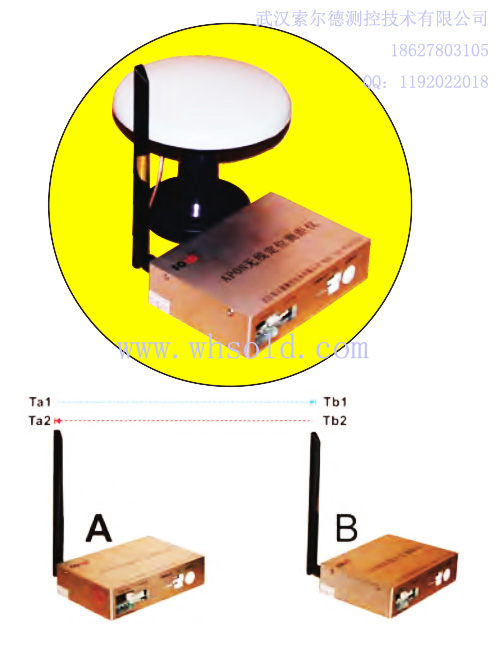
每个模块从启动开始即会生成一条独立的时间戳。模块A的发射机在其时间戳上的Ta1发射请求性质的脉冲信号,模块B接收机在其时间戳上的Tb1接收到该信号。对信号加以一定的处理手段后,模块B在Tb2时刻发射一个响应性质的信号,被模块A在自己的时间戳Ta2时刻接收。由此可以计算出脉冲信号在两个模块之间的飞行时间,从而确定飞行距离。
计算公式如下:S=C*【(Ta2-Ta1)-(Tb2-Tb1)】/2
其中C为光速,S为要计算的距离,Ta1、Ta2、Tb1、Tb2为时间戳。
在测速方面,系统根据测距所得数据,由卡尔曼Kalman滤波的最优回归方程计算出模块之间的径向速度。






发表评论 评论 (0 个评论)