|
本文基于模糊控制器的基础上,设计实现了一种双模糊控制器,根据实际系统输出信号的误差大小利用两个模糊控制器分别进行控制,以改善系统的快速性和消除误差。 1 双模糊控制器的设计 单模糊控制器主要用于快速响应及对大误差的消除,在单模糊控制器中,将其误差量化因子Ke增大,从而相当于缩小了误差的基本论域,增大了对误差变量的控制作用。同时,将误差变化率因子Kec增大,以减小超量。将控制量的比例因子Ku减小,以减小系统振荡。 双模糊控制器原理图如图1所示,假设变量eo为大、小误差的临界值(人为可以根据实际设定),当系统误差较大时,用单模糊控制器1控制,以达到快速响应、消除误差的目的;当系统的误差较小时,用单模糊控制器2进行控制,从而改善模糊控制器对于系统误差较小时的控制效果,进而帮助取得较好的控制效果。
设计双模糊控制器时,将输入信号误差e量化为8个等级,{NB,NM,NS,NO,PO,PS,PM,PB},误差变化率ec和输出变量u量化为7个等级,{NB,NM,NS,ZO,PS,PM,PB},误差e及误差变化率ec、输出变量u论域为[-6,6]。误差e及误差变化率ec、输出变量u的隶属度函数选为梯形隶属度函数如图2所示;
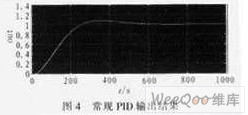
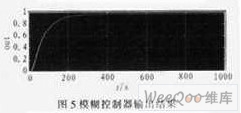
2 仿真过程及结果 利用MATLAB的SIMULINK进行仿真,建立本系统的双模糊控制器仿真结构图如图3所示。仿真结构图里设计了两个子系统如图3,两个子系统结构基本一致,只是具体参数选取不同。
常规PID控制存在明显的超调,模糊控制及双模糊控制则没有超调。模糊控制方法和双模糊控制器方法区别在于,模糊控制器存在2%~5%左右的稳态误差,而双模糊控制器在稳态时消除了稳态误差! 3 小结 本设计实现了一种双模糊控制器,利用双模糊控制器完成了对系统的仿真。仿真结果显示,双模糊控制器的上升时间短,响应速度快,稳态精度高。从仿真结果来看,和常规PID控制及普通模糊控制相比,双模糊控制器有效地减小了系统稳态误差,响应时间、超调量、稳定时间等性能均优于传统的PID控制和模糊控制。双模糊控制器可以改善系统的控制精度和稳定性能,可以在实际工程中应用,并将带来巨大的价值!
|
双模糊控制器的设计与实现











发表评论 评论 (0 个评论)